
A menudo se necesita saber si hay consumo de agua en una instalación. Saber si una instalación está consumiendo agua puede ayudar a controlar fugas de agua ya que si estamos seguros de que todos los grifos y válvulas están cerrados y hay una medida positiva de caudal, evidentemente tenemos una fuga de agua.
Existen dispositivos Z-Wave para detectar inundaciones como por ejemplo los siguientes: Fibaro Flood Sensor, Sensor de inundación POPP o AEOTEC Water Sensor.
El Fibaro Flood Sensor ya lo analizamos en este artículo.
Pero dichos dispositivos se basan en contactos pegados al suelo que detectan inundaciones, generalmente en suelos lisos y no muy extensos, como una cocina o un baño. ¿Qué pasa si tengo una fuga de agua en el jardín?. Efectivamente en un jardín estos dispositivos pierden su eficacia y generalmente no están diseñados para estar a la intemperie.
La solución que proponemos en este artículo no es detectar una inundación, sino detectar un consumo excesivo de agua basado en reglas heurísticas o información adicional como saber que todos los grifos están cerrados y el consumo debería ser cero.
Dispositivos
Dado que no existe un sensor de caudal Z-Wave lo vamos a implemenntar utilizando un sensor de caudal tradicional y una interfaz a la red Z-Wave.
El sensor de caudal que vamos a utilizar es este.

Se compone de una turbina interior y un Sensor de Efecto Hall, de tal forma que cuando pasa el agua a través de él hace girar la turbina. Cada giro de la turbina produce un pulso a su salida.
Este dispositivo tiene 3 cables: Negro alimentación negativa, Rojo alimentación positiva y amarillo la salida de datos.
Como nos especifica el fabricante, este sensor es capaz de medir a partir de 2 litros por minuto lo que no quiere decir que con menos caudal la turbina se mueva y podamos deducir que hay consumo de agua.
Lo podremos alimentar con una tensión de 2.4V DC a 26 V DC y a su salida obtendremos un tren de pulsos con frecuencia directamente proporcional al caudal que pasa por el sensor.
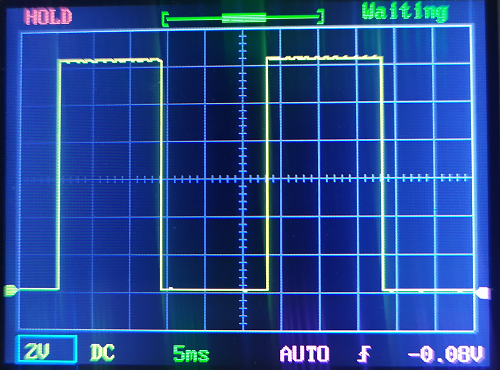
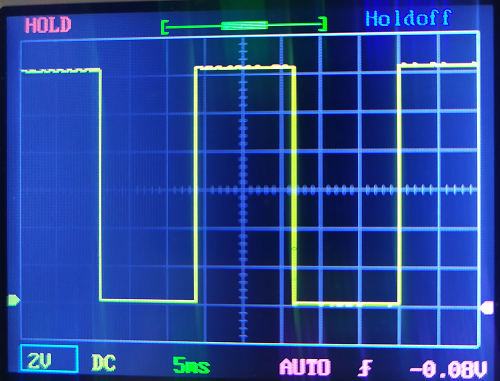
Las siguientes dos imágenes corresponden a la señal de salida del sensor con dos caudales diferentes. Se puede apreciar como cambia la frecuencia en función del caudal que pase por el sensor y que la señal cuadrada va de 0 a 12V DC.
Como interfaz con la red Z-Wave utilizaremos un Fibaro Smart Implant que es un dispositivo al cual le podemos configurar una entrada como entrada analógica 0-10 V. Otro dispositivo que podríamos haber usado es un Fibaro RGBW 2 puesto que sus 4 entradas también pueden ser configuradas como entradas analógicas. Cualquiera de ellos es válido y para gustos los colores.
Como hemos visto anteriormente el sensor varía su frecuencia en función de su caudal. Todos sabemos que el valor eficaz de una señal cuadrada continua no varía con su frecuencia. Si la entrada, teóricamente, va a medir este valor eficaz, lo lógico es que este valor no varíe con respecto al caudal. Y esto es cierto en parte dado que las capacidades internas del puerto de entrada, supuestamente un ADC del propio chip Z-Wave, harán que a mayor frecuencia el valor sea mayor. Lo que está claro es que el valor medido no va a ser muy fiable, pero al menos, y es nuestro objetivo, sabremos si hay caudal o no.
Otro problema que tendremos con el sensor será que al ser básicamente una turbina con un imán, habrá momentos sin caudal donde la turbina se pare y el imán quede en una posición en el que, estando parada la turbina, la señal sea de 12V DC. Este problema lo resolveremos más adelante.
Además cuando la señal se queda en 12 V DC le estaríamos introduciendo 12 V a la entra 0-10V del Fibaro Smart Implant y lo que hemos comprobado es que da problemas y no representa ese valor. Veremos como resolverlo a continuación.
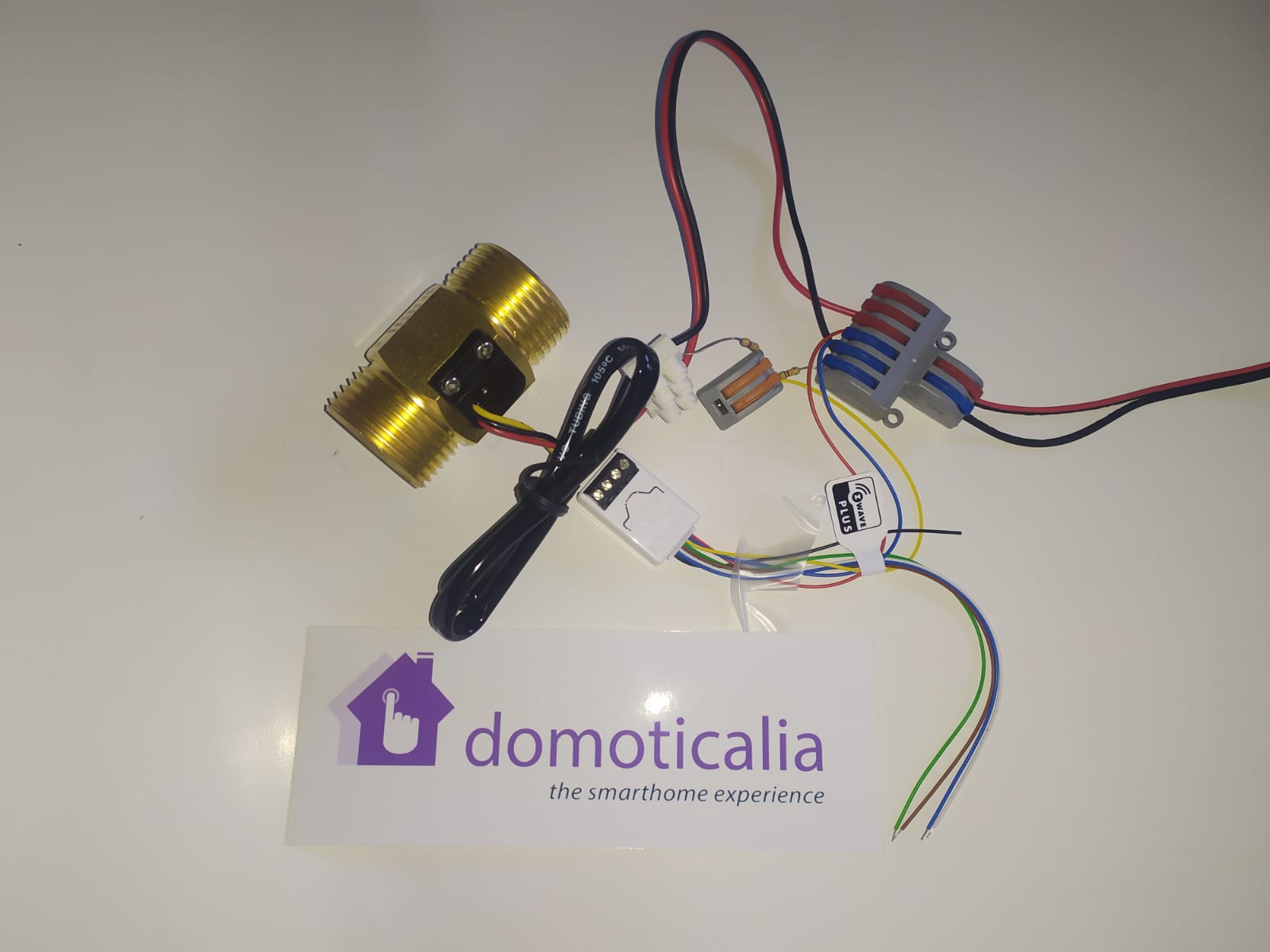
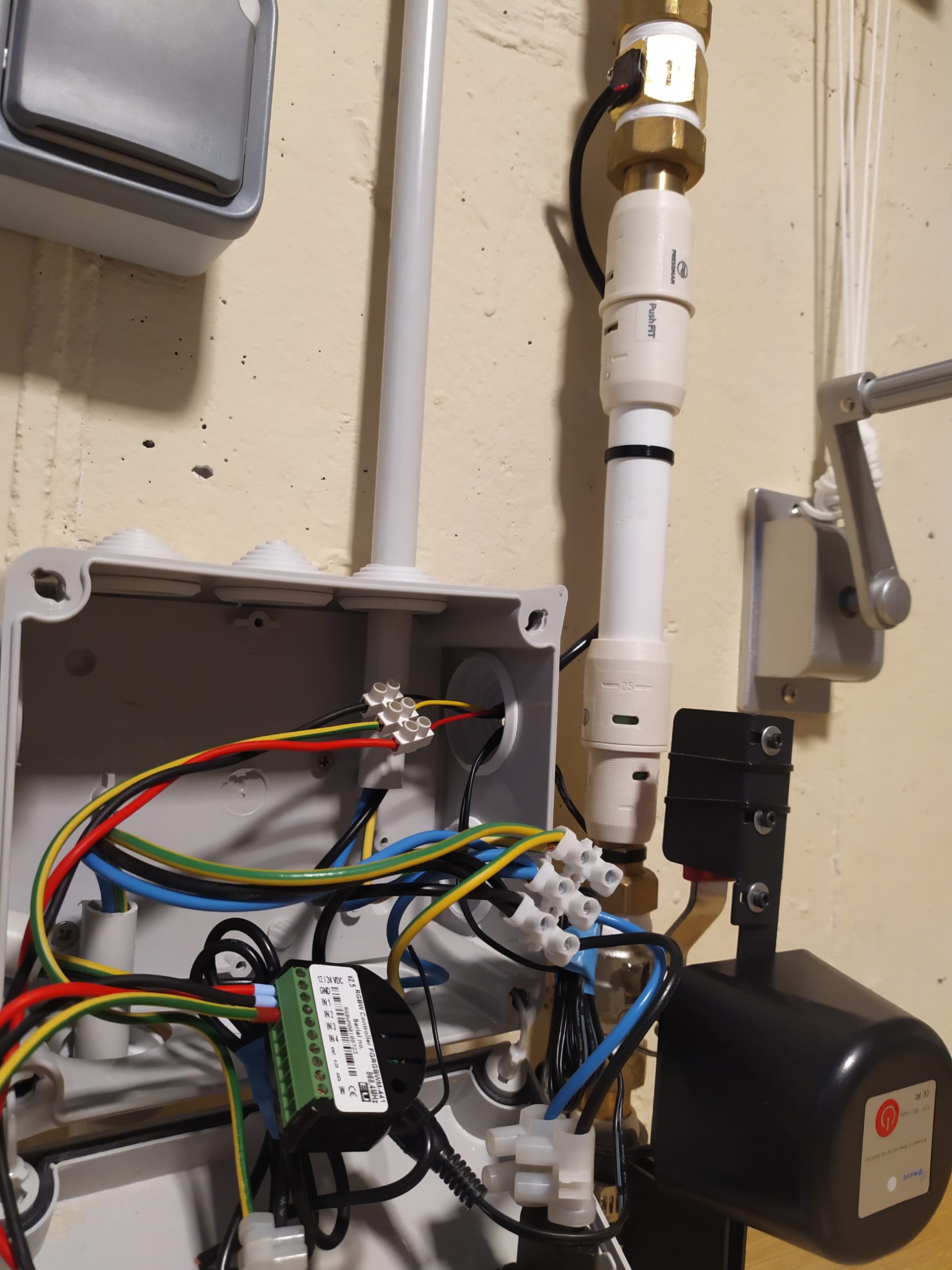
Kit de elementos anti fuga
Conexionado y configuración
Tanto el Fibaro Smart Implant como el sensor los alimentaremos a 12V DC por ejemplo, aunque ambos podríamos conectarlos sin problemas a 24 V DC.
Para resolver el problema de los 12V DC del sensor vamos a poner un divisor de tensión, por ejemplo con dos resistencias de 10KΩ. De esta manera mediremos tensiones de 0 a 6V DC.
Configuraremos las dos resistencias en serie y pondremos un extremo a masa y el otro a la salida del sensor. A el punto entre las dos resistencias conectaremos una de las entradas del Fibaro Smart Implant.
Después de dar de alta el Fibaro Smart Implant en nuestra red Z-Wave configuraremos la entrada como entrada analógica con resistencia interna de pull-up.
Para los controladores del fabricante Fibaro la configuración es muy sencilla como se observa en la siguiente imágen de Home Center 2.
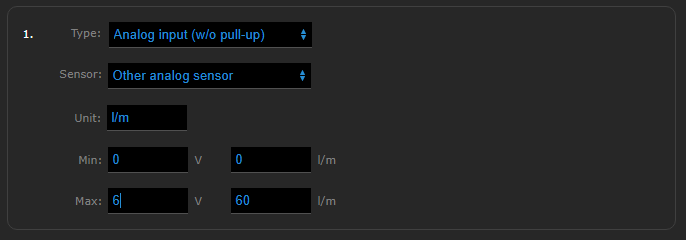
En otros controladores bastaría con cambiar el parámetro 20 y asignarle valor 4.
Desde este momento ya podremos probar el dispositivo y verificar los valores que nos asigna según haya caudal o no.
En los controladores del fabricante Fibaro se nos presenta como se muestra en la siguiente figura.
El dispositivo nos muestra tres valores, con alguna diferencia de tensión:
- Algo mayor que 0 V.
- En torno a 3 V.
- En torno a 6V.
El valor de 0 V y el de 6 V se produce cuando la turbina está parada. El de 3 V se produce cuando hay algo de flujo en la turbina.
Por lo tanto podríamos definir escenas interpretando que hay caudal de agua si el valor está entre 1 V y 5 V, que era nuestro objetivo.
Hay que hacer una nota aclaratoria y es que un sistema de este tipo en el que los valores analógicos de entrada pueden cambiar constantemente, si se reportase cada cambio al controlador, podría saturar la red Z-Wave. Por lo tanto los cambios de valor se enviarán como mucho cada 1 minuto. Es decir, no hay forma de configurar Fibaro Smart Implant para que envíe reportes en intervalos más pequeños, en toda lógica.
Detalle control de Caudal Z-Wave con Fibaro RGBW